2021
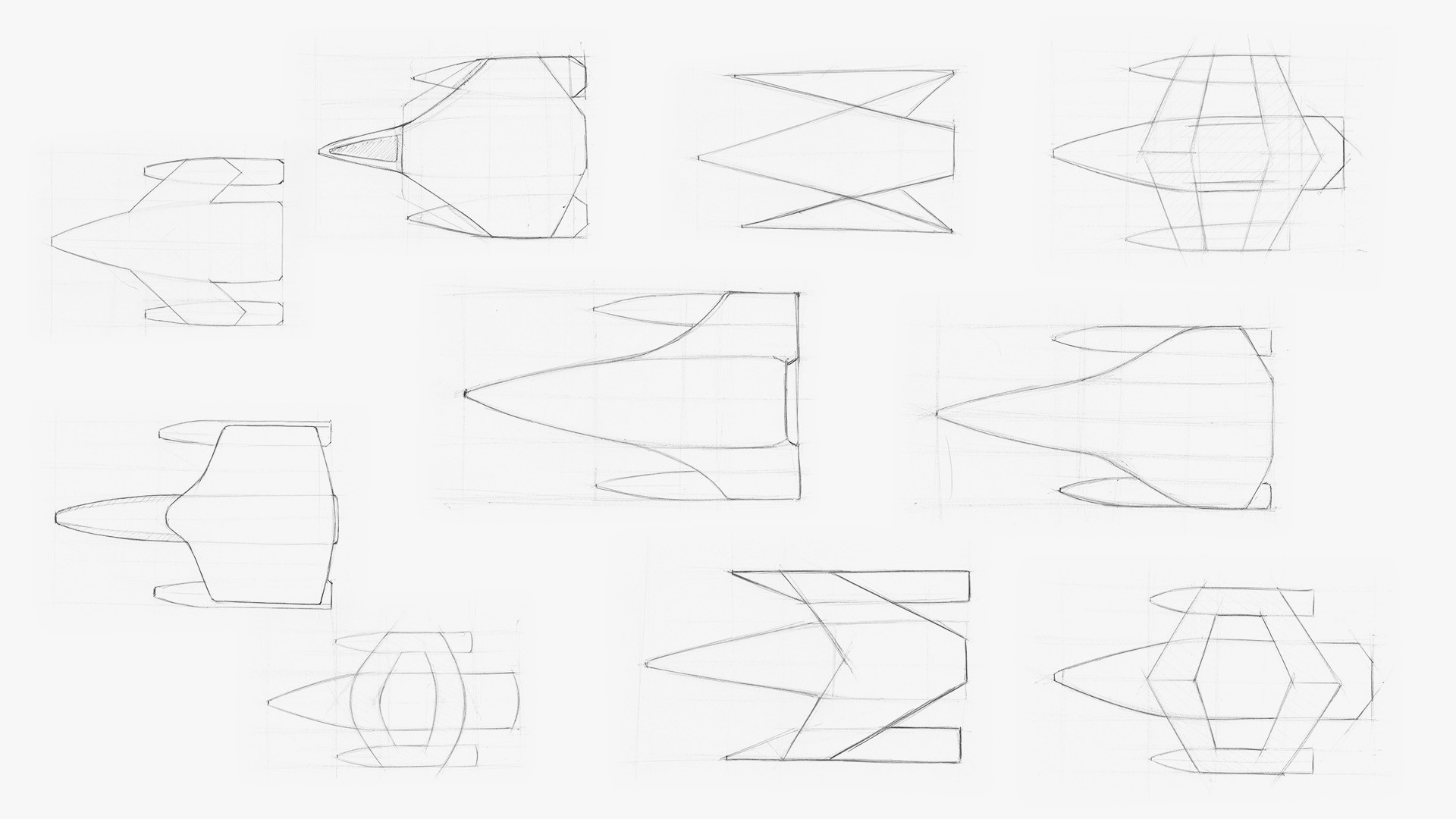
Autonomous surveying boat
Xocean was created in collaboration with Jan Schnyder. The aim of the project was to make the time-consuming and costly measurement of the seabed more efficient. So far, the measurement at sea is only partially automated,